DeepHolo
Abstract:
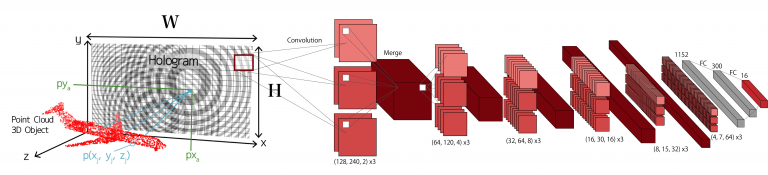
Three-dimensions (3D) models contain a wealth of information about every object in our universe. However, it is difficult to semantically recognize the media forms, even when they featured in simplest form of objects. We propose the DeepHolo network using binary-weighted computer-generated holograms (CGHs) reconstructed from point cloud models. This neural network facilitates manipulation of 3D point cloud form, and allows it to be processed as Two-dimensions (2D) data. We construct the network using hologram data, which is simpler and contains smaller volume of information than their point cloud data(PCD) counterpart, leading to a smaller number of parameters required. The Deep Neural Network (DNN) is trained to recognize holograms of 3D objects, so that it resembles a point attributed to a 3D model of a similar object to the one depicted in the hologram. DeepHolo network allows high precision object recognition, as well as processing 3D data using much lesser computer resources. We evaluate our method on a recognition task space efficiency, and outperforming state-of-the-art methods.
Three-dimensions (3D) models contain a wealth of information about every object in our universe. However, it is difficult to semantically recognize the media forms, even when they featured in simplest form of objects. We propose the DeepHolo network using binary-weighted computer-generated holograms (CGHs) reconstructed from point cloud models. This neural network facilitates manipulation of 3D point cloud form, and allows it to be processed as Two-dimensions (2D) data. We construct the network using hologram data, which is simpler and contains smaller volume of information than their point cloud data(PCD) counterpart, leading to a smaller number of parameters required. The Deep Neural Network (DNN) is trained to recognize holograms of 3D objects, so that it resembles a point attributed to a 3D model of a similar object to the one depicted in the hologram. DeepHolo network allows high precision object recognition, as well as processing 3D data using much lesser computer resources. We evaluate our method on a recognition task space efficiency, and outperforming state-of-the-art methods.